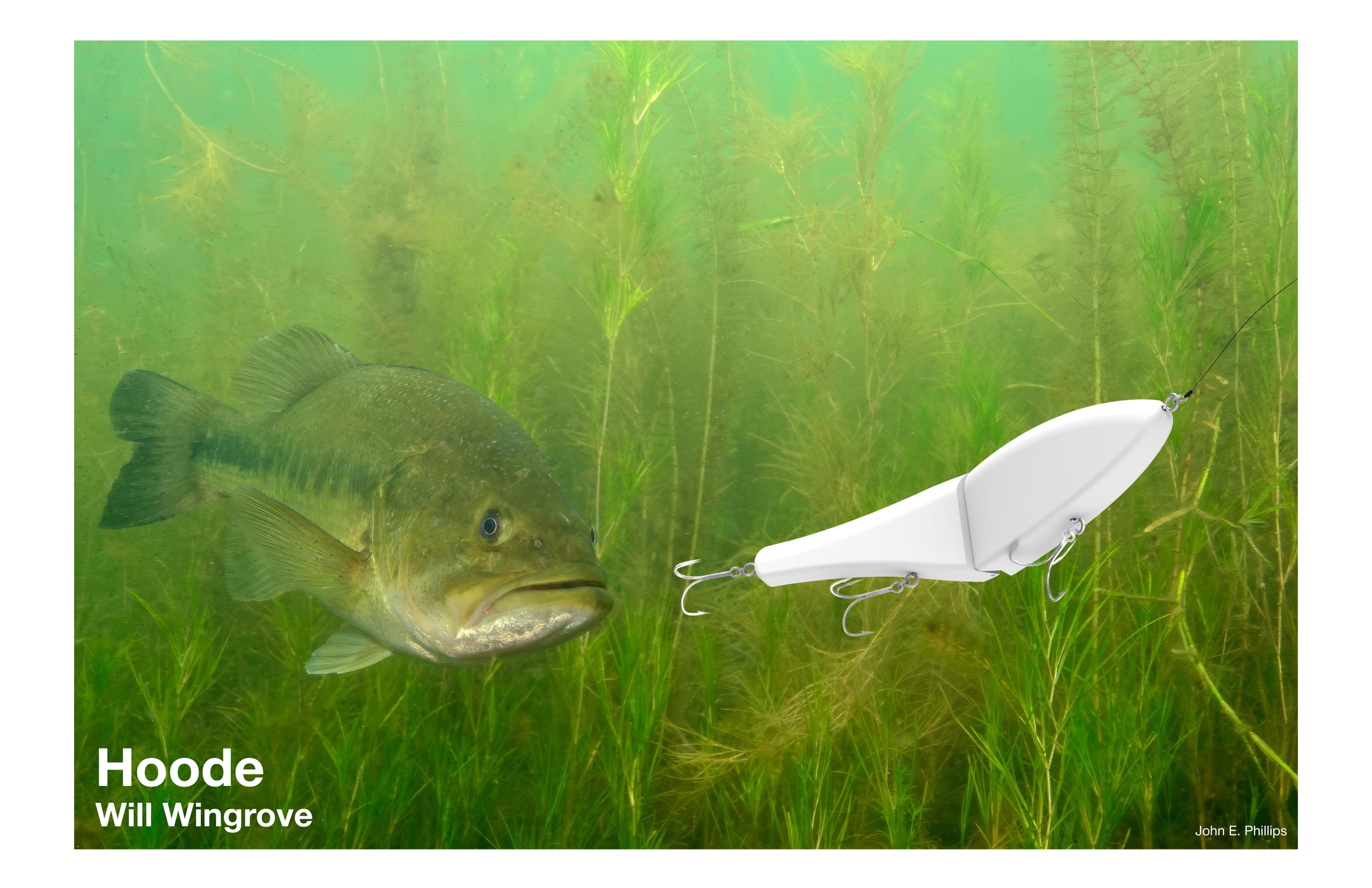
Hoode
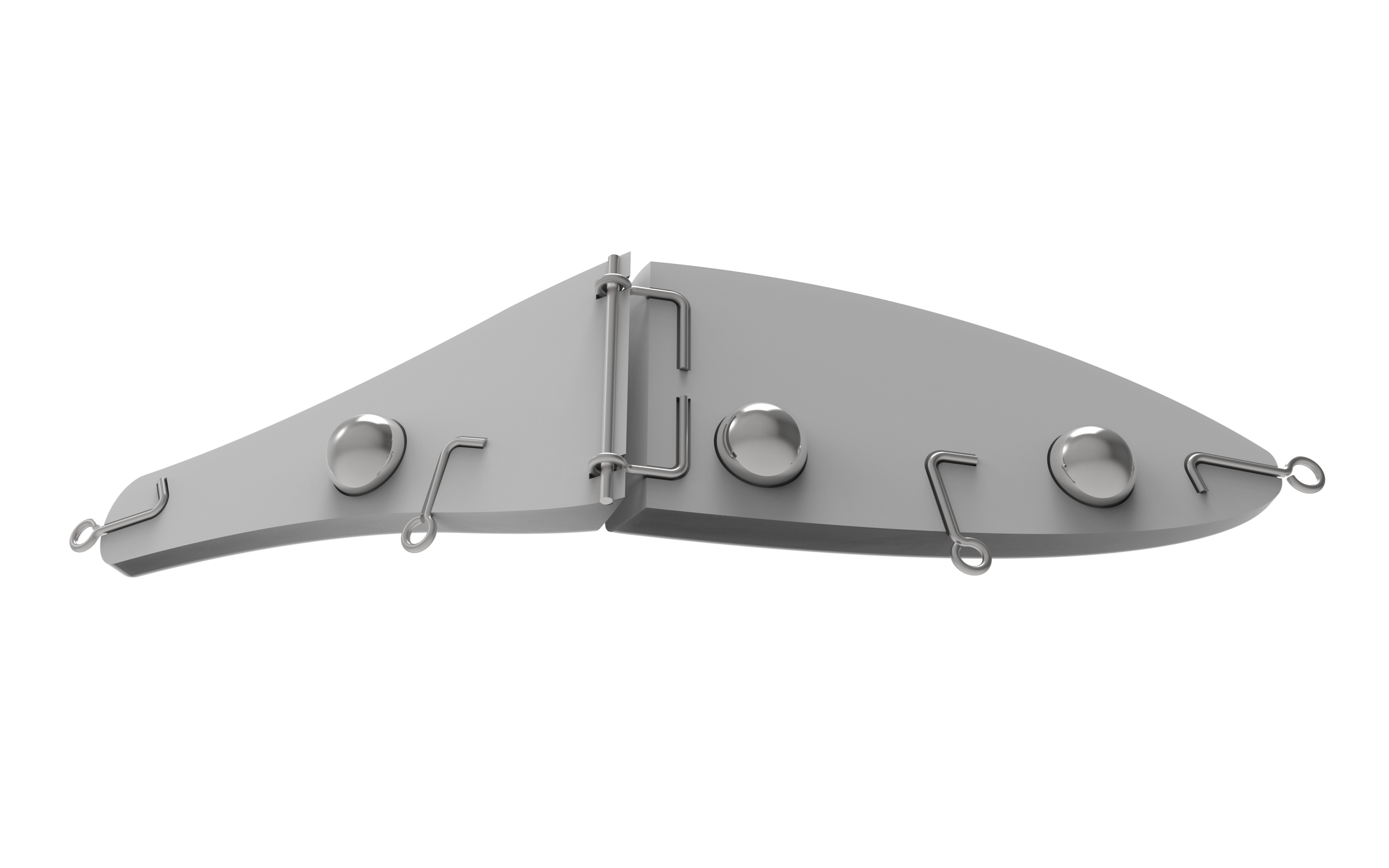
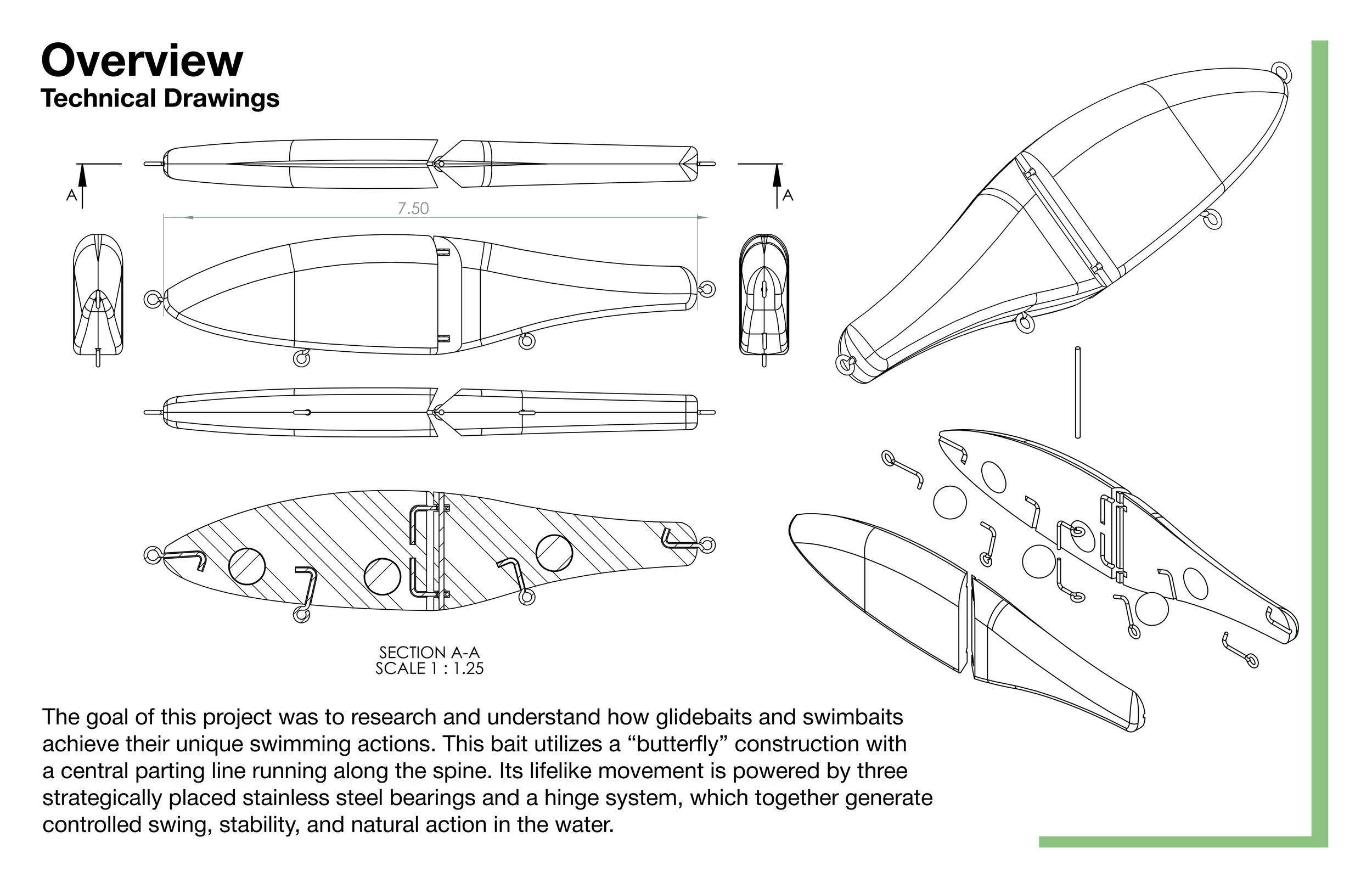
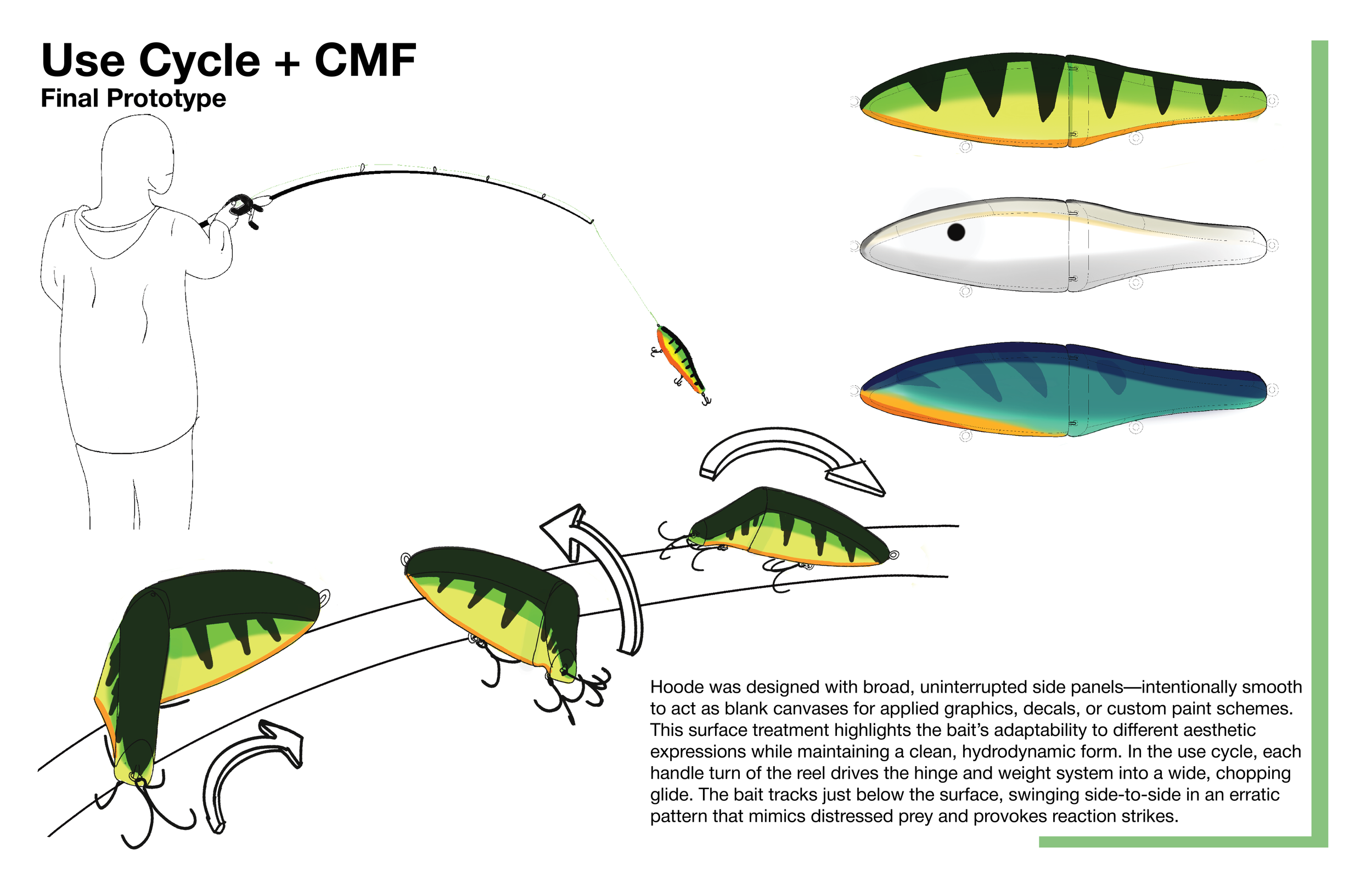
This project is about turning a fishing lure into an engineered experiment, using physics and intentional weight placement instead of guesswork to design a slow sinking, wide gliding swimbait. The goal is to create a lure that falls in a controlled, nearly horizontal posture, can be counted down to a predictable depth, and produces a wide, sweeping action on the retrieve. By modeling the bait in CAD, controlling body volume and density (PLA infill) and strategically placing steel bearings as ballast, the project explores how buoyancy, center of mass, and weight distribution affect sink rate, fall attitude, and swim behavior. Ultimately, this swimbait serves as a testbed for developing a repeatable, physics driven process for designing and tuning future lures.

Testing Phase
Version one was tested locally in the Rideau Canal.